
Navigacijos Žymeklio Linijos Krašto Aptikimo ir Kliūčių Atpažinimo Algoritmai: Kalmanas Filtras ir Jo Taikymas
Vaizdo atpažinimo srityje, ypač susijusioje su autonomine navigacija ir saugumu, kraštų aptikimas ir kliūčių atpažinimas yra fundamentalūs procesai. Šie procesai leidžia sistemoms suprasti aplinką, identifikuoti svarbius objektus ir priimti pagrįstus sprendimus. Vienas iš efektyviausių įrankių, naudojamų šiuose procesuose, yra Kalmanas filtras, kuris padeda tiksliai stebėti ir prognozuoti judančių objektų trajektorijas, net ir esant triukšmingiems duomenims.
Krašto Aptikimo Algoritmai: Pagrindas Vaizdo Analizei
Kraštas (angl. "Edge") vaizde yra sritis, kurioje pastebimai ir reikšmingai kinta ryškumas. Tai taškų, kuriuose pilkos spalvos lygis yra nenutrūkstamas arba drastiškai keičiasi, visuma. Kraštų aptikimo tikslas - nustatyti tuos skaitmeninio vaizdo taškus, kuriuose įvyksta ryškumo pokyčiai. Nors kompiuterinio matymo apdorojimo metodai ne visada tiesiogiai naudoja kraštų aptikimą kaip išankstinį apdorojimą, jis išlieka svarbia savybe, remiančia vaizdo segmentaciją ir sudarančia vaizdo analizės pagrindą.
Tarp dažniausiai naudojamų kraštų aptikimo operatorių išskiriami gradiento operatoriai. Jie veikia analizuodami vaizdo gradientą, kuris parodo ryškumo pasikeitimo kryptį ir dydį. Pavyzdžiui, Sobel operatorius ir Prewitt operatorius yra plačiai naudojami dėl savo paprastumo ir efektyvumo. Šie operatoriai apskaičiuoja pikselio reikšmę, atsižvelgdami į jo kaimynystės pikselių reikšmes, taip nustatydami, ar tam tikroje vietoje yra ryškumo kraštas.

Kraštų aptikimas yra kritinis žingsnis daugelyje vaizdo apdorojimo užduočių. Jis padeda segmentuoti vaizdą į atskirus objektus ar regionus, atskiriant juos nuo fono. Tai ypač svarbu, kai vėliau analizuojami sudėtingesni vaizdo elementai, tokie kaip kliūtys.
Kliūčių Atpažinimas: Saugumo Pagrindas
Kliūčių atpažinimas yra esminis komponentas autonominių transporto priemonių ir kitų automatizuotų sistemų saugumui. Metodo pasirinkimas priklauso nuo aplinkinės aplinkos ir pačių kliūčių apibrėžimo. Kliūtis gali būti apibrėžta kaip bet koks objektas, kuris kelia pavojų transporto priemonės judėjimui kelyje. Bendros kliūtys kelyje apima kitas transporto priemones, pėsčiuosius, gyvūnus, kelio ženklus, šiukšles ir kitus netikėtus objektus.
Kritiniausi kliūčių atpažinimo metodai apima tris pagrindinius etapus: aptikimą, stebėjimą ir lokalizaciją.
- Aptikimas reiškia patvirtinimą, ar yra kliūtis laukiamame regėjimo kelyje. Tai pirmasis ir svarbiausias žingsnis, kurio metu sistema nustato, ar egzistuoja potenciali kliūtis.
- Stebėjimas reiškia pasirinkto taikinio (kliūties) trajektorijos sekimą laiko eigoje. Tai leidžia suprasti, kaip kliūtis juda ir ar jos judėjimas kelia grėsmę.
- Lokalizacija reiškia faktinio atstumo tarp kliūties ir automatinės transporto priemonės nustatymą. Tai suteikia sistemai informaciją apie kliūties artumą ir leidžia priimti sprendimus dėl saugaus manevravimo.
Tarp šių etapų, aptikimas yra pagrindas, stebėjimas yra procesas, o lokalizacija yra galutinis tikslas. Kiekvienas etapas remiasi ankstesniu ir prisideda prie bendro sistemos supratimo apie aplinką.
Erdvinių Taikinių Sekimas: Nuo Vaizdo Iki Trajektorijos
Erdvinių taikinių sekimas (angl. "Spatial Target Tracking") yra procesas, kurio metu konstruojamas taikinio šablonas, naudojant veiksmingas taikinio savybes, ir ieškoma kandidato regiono vaizdo sekoje, kuris yra labiausiai panašus į taikinio šabloną. Kitaip tariant, tai yra taikinio trajektorijos nustatymas vaizdo sekoje.
Tiriant erdvinių kliūčių tikslo stebėjimo problemą, pagrįstą monokuline vizija (naudojant vieną kamerą), yra dvi bendros idėjos:
- Nepasikliaudami jokiomis a priori žiniomis: Kliūtys aptinkamos tiesiogiai iš vaizdo sekos, ir tada stebimi jų dominančiai tikslai. Šis metodas yra lankstesnis, bet gali būti mažiau tikslus ir labiau jautrus triukšmui.
- Remdamiesi a priori žiniomis apie kliūtis: Pirmiausia taikiniai modeliuojami, o po to realiuoju laiku vaizdo sekoje ieškoma atitikmenų modeliui, o po to jie stebimi. Antroji idėja dažniausiai naudojama, nes kliūtys egzistuoja tam tikroje veikimo aplinkoje ir gali būti vaizduojamos kaip baigtinių elementų rinkinys.
Taikant šį stebėjimo metodą, pirmas žingsnis siekiant stebėjimo yra atlikti tikslinį aptikimą. Tai reiškia dominantį regioną, kuris gali būti kliūtimi, išskirti iš fono vaizdo sekoje.
Tikslo stebėjimo proceso metu dažnai būtina numatyti tikslo vietą ateityje. Tam naudojami paieškos algoritmai, kurie susiaurina paieškos diapazoną ir padeda efektyviau rasti taikinį sekos vaizduose. Ši prognozė yra ypač svarbi dinamiškoje aplinkoje, kur kliūtys gali staiga pakeisti judėjimo kryptį ar greitį.
Kalmanas Filtras: Tikslus Judančių Objektų Stebėjimas
Kalmano filtras yra galingas algoritmas, naudojamas sekos duomenų apdorojimui, ypač kai duomenys yra triukšmingi. Jis leidžia prognozuoti sistemos būseną (pvz., padėtį, greitį) remiantis ankstesnių matavimų seka ir procesų modeliu. Kalmanas filtras yra ypač naudingas kliūčių atpažinimo ir stebėjimo užduotims, nes jis gali efektyviai filtruoti triukšmą iš kameros ar kitų jutiklių gaunamų duomenų ir pateikti tikslesnę bei stabilesnę judančio objekto trajektoriją.
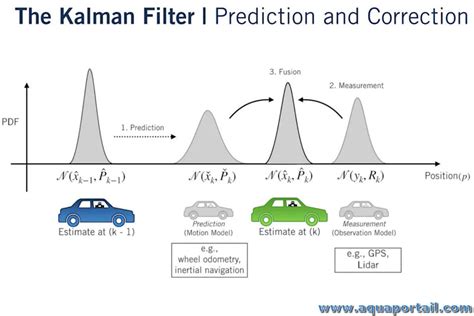
Kalmano filtras veikia dviem etapais: prognozavimo ir atnaujinimo.
- Prognozavimo etapas: Remiantis ankstesne sistemos būsena ir judėjimo modeliu, filtras prognozuoja dabartinę sistemos būseną. Ši prognozė apima ir neapibrėžtumo įvertinimą.
- Atnaujinimo etapas: Kai gaunamas naujas matavimas (pvz., objekto padėtis vaizde), filtras sujungia prognozę su matavimu, atsižvelgdamas į abiejų neapibrėžtumą. Rezultatas yra atnaujinta ir tikslesnė sistemos būsenos prognozė.
Kalmano filtro taikymas kliūčių atpažinime leidžia:
- Padidinti stebėjimo tikslumą: Net ir trumpalaikiai matavimų sutrikimai ar triukšmas nėra tokie reikšmingi, nes filtras "lygina" duomenis ir pateikia stabilesnę trajektoriją.
- Prognozuoti būsimą padėtį: Tai leidžia sistemai iš anksto numatyti, kur kliūtis bus po kelių akimirkų, ir laiku sureaguoti, pvz., sulėtinti, sustoti ar pakeisti kryptį.
- Sumažinti skaičiavimo apkrovą: Nors Kalmanas filtras yra sudėtingas matematiniu požiūriu, jo įgyvendinimas paprastai yra gana efektyvus ir nereikalauja didelių skaičiavimo resursų, palyginti su kitais sudėtingais sekimo algoritmais.
- Filtruoti klaidingus aptikimus: Kartais dėl triukšmo ar netikėtų vaizdo pokyčių gali atsirasti klaidingi taikinių aptikimai. Kalmanas filtras, stebėdamas nuoseklumą, gali padėti atmesti tokius klaidingus aptikimus.
Kalmano filtras. 1 dalis
Kalmano filtras gali būti pritaikytas įvairiems judėjimo modeliams, nuo paprasto tiesiaeigio judėjimo iki sudėtingesnių, pavyzdžiui, su pagreičiu ar posūkiais. Pasirinktas modelis priklauso nuo tikėtino kliūčių judėjimo pobūdžio.
Išplėstinis Kalmanas Filtras ir Jo Variacijos
Nors standartinis Kalmanas filtras yra labai efektyvus tiesiniams sistemoms, daugelis realaus pasaulio problemų, įskaitant vaizdo atpažinimą, apima netiesines sistemas. Dėl šios priežasties buvo sukurti išplėstiniai Kalman filtro variantai, tokie kaip Išplėstinis Kalmanas filtras (Extended Kalman Filter - EKF) ir Nešantis Kalmanas filtras (Unscented Kalman Filter - UKF).
Išplėstinis Kalmanas filtras (EKF) naudoja Jakobio matricų (funkcijos išvestinių matricų) tiesinimą netiesinėms funkcijoms prognozavimo ir atnaujinimo etapais. Tai leidžia pritaikyti Kalmaną filtrą prie netiesinių sistemų, tačiau tiesinimo procesas gali sukelti netikslumų, ypač jei netiesinės funkcijos yra labai nenuoseklios.
Nešantis Kalmanas filtras (UKF) naudoja kitokį principą - jis pasirenka deterministinių "signalo taškų" rinkinį, kuris apima tikimybinės informacijos distribuciją. Šie taškai yra perduodami per netiesines funkcijas, o tada iš jų atstatoma atnaujinta distribucija. UKF dažnai pasiekia geresnį tikslumą nei EKF net ir sudėtingose netiesinėse sistemose, ir nereikalauja tiesioginio išvestinių skaičiavimo.
Šie išplėstiniai variantai yra ypač vertingi, kai analizuojami vaizdai, kur transformacijos (pvz., perspektyvinės projekcijos) yra netiesinės. Jie leidžia Kalmanui filtrui tiksliai sekti objektus, net jei jų vaizdavimas ekrane keičiasi netiesiniu būdu.
Kalmanas Filtras Kraštų Aptikime ir Kliūčių Detekcijoje
Nors Kalmanas filtras dažniausiai asocijuojamas su judančių objektų sekimu, jo principus galima taikyti ir kraštų aptikimo bei bendros kliūčių detekcijos procesams. Pavyzdžiui, siekiant pagerinti kraštų aptikimo stabilumą, Kalmanas filtras gali būti naudojamas sekos vaizduose, kad "išlygintų" kraštų aptikimo rezultatus ir sumažintų atsitiktinius triukšmo sukeltus kraštus.
Kalmano filtras gali būti integruotas į sudėtingesnes kliūčių atpažinimo sistemas. Pavyzdžiui, po pirminio kliūties aptikimo, Kalmanas filtras gali būti naudojamas jos judėjimo trajektorijai prognozuoti, taip padedant sistemai skirti daugiau resursų potencialiai pavojingoms kliūtims arba numatyti, ar kliūtis paliks transporto priemonės kelią.
Taikant Kalmaną filtrą kliūčių aptikimui, svarbu tinkamai suformuluoti sistemos modelį. Tai apima:
- Būsenos vektorių: Tai gali būti kliūties padėtis (x, y koordinatės), greitis (vx, vy), pagreitis (ax, ay), o taip pat ir jos dydis ar orientacija.
- Proceso modelį: Tai apibrėžia, kaip būsena keičiasi laiko eigoje. Pavyzdžiui, paprastas modelis gali teigti, kad greitis lieka pastovus (jei nėra pagreičio).
- Matavimo modelį: Tai apibrėžia, kaip būsena susijusi su matavimais, gaunamais iš jutiklių (pvz., kameros).
Tinkamai sukonfigūruotas Kalmanas filtras gali žymiai pagerinti autonominių sistemų gebėjimą saugiai ir efektyviai veikti dinamiškoje aplinkoje, atpažįstant ir sekant kliūtis realiu laiku. Jis suteikia tvirtą matematinį pagrindą duomenų filtravimui ir prognozavimui, kuris yra būtinas šiuolaikiniam autonominiam vairavimui.
tags: #vaizdu #atpazinimo #kalmano #filtras